Technologies and Approaches.
1. Remote Optical Characterisation
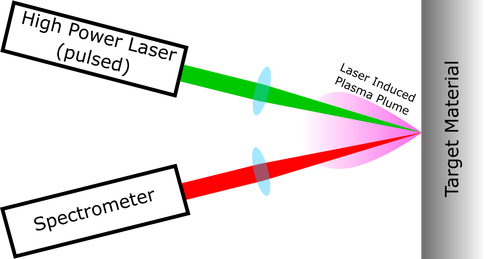
Laser Induced Breakdown Spectroscopy or LIBS uses a high powered focused laser to ablate a minute sample from the surface of a material. The cooling of the resultant plasma releases light with a spectrum unique to the elements in the material enabling elemental characterisation of a surface from a distance.
|
Raman spectroscopy uses a low-powered collimated laser beam incident on a material to measure the elastic (Rayleigh) and inelastic (Stokes and anti-Stokes) light scattering, where the shift from the original wavelength provides information about the chemical (molecular and compound structure of the materials). It can be used in either fibre optic or free spaced light delivery.
|
|
Hyperspectral imaging (HSI) measures the reflectance spectrum of the material to be characterised using a white light source with detection at bands in the visible or near-infrared part of the spectrum. Each image point is a spectrum in itself. HSI can be used to quickly map areas of pre-identified materials that reflect light at particular wavelengths
2. Radiation Sensing
There are many challenges in radiation sensing in extreme environments: most conventional radiation sensing technologies suffer saturation, dead-time problems, radiation damage or catastrophic failure; hazardous ancillary requirements such as cryogenic cooling and high voltage can be prohibited; the electronics necessary to drive and retrieve data from such detectors is also vulnerable to radiation effects; the environments are cluttered in terms of there being several different types of radiation present and thus separation and segregation of specific forms can be desirable (consider for example á activity, neutron and specific spectroscopic g lines).
In this project, we intend to focus on the use of a combination of an sCVD synthetic diamond detector and a cerium bromide (CeBr3) detectorl. The diamond detector is shielded to RF and resilient up to 500 K; compact for integration into a remote-deployed platform and radiation tolerant. The detector can be operated in pulsed mode or spectroscopic mode.
CeBr3 is a material amongst the latest developments in room temperature, low background (self-activity) high-resolution g-ray spectrometry. It offers high light output, is compact in use (similar to sodium iodide) and offers high levels of energy and time resolution. In particular, its high speed of response implies that its susceptibility to pile-up and saturation will be reduced relative to longer-established inorganic scintillation detectors and thus be more suited to high-dose rate applications associated with extreme environments.
3. Robotics Systems
The focus in this project will be to utilise existing robotic technology for the deployment of the sensing technologies, such as the AVEXIS and MIRRAX vehicles, developed at UoM. The integration of optical sensors and detectors into these vehicles raises a number of research questions. For example, for a sub-aqua vehicle, should the optical sensors be mounted inside or outside? How stable does the robotic platform need to be when taking optical and radiological measurements and how can control systems be designed to provide this level of stability? How close to radioactive sources does the vehicle need to be to take meaningful measurements? At such distances and with known radiation dose rates, what is the longevity of the robotic equipment and can this be increased using low-cost solutions, such as software redundancy and shielding of sensitive components?
4. System Integration and Data Analysis:
It will be necessary to combine the collected data to form a 3D ‘map’ of the environment, with clear identification of materials and isotopes present within it.
We will design and develop a dedicated 3D (and 4D, with time) spatial database management system using concepts traditionally employed in geographical information system (GIS) techniques. This will require positional information, which is a challenge in the dark, indoor (sometimes submerged) areas that are characteristic of nuclear environments.In addition, the use of NNL’s new EnVi™ code (developed for nuclear environments) will enable us to convert any ungeoreferenced data to spatially accurate 3D data. To analyse the optical measurements we will utilise multivariate statistical tools (PCA, ICA, alternating least squares, etc.) to extract information from the data and machine learning algorithms to combine the results from the different sensors.
We will design and develop a dedicated 3D (and 4D, with time) spatial database management system using concepts traditionally employed in geographical information system (GIS) techniques. This will require positional information, which is a challenge in the dark, indoor (sometimes submerged) areas that are characteristic of nuclear environments.In addition, the use of NNL’s new EnVi™ code (developed for nuclear environments) will enable us to convert any ungeoreferenced data to spatially accurate 3D data. To analyse the optical measurements we will utilise multivariate statistical tools (PCA, ICA, alternating least squares, etc.) to extract information from the data and machine learning algorithms to combine the results from the different sensors.
