|
Recently the TORONE team demonstrated the capability of the LIBS and Raman instruments (find out more here) developed during the project at the University of Manchester Robotics for Extreme Environments Laboratory. Attended by nuclear industry representatives, the platform equipped with LIBS instrumentation performed a live demonstration of materials identification, such as stainless steels, copper and other commonly found materials in nuclear facilities. When the instrumentation is twinned with a mobile platform, its possible to have the robot autonomously decide on the best location to sample a surface and navigate to that position on behalf of a human operator (learn more in this article). Operators can engage the laser system and view the captured spectra from a laptop remotely, removing humans from possibly hazardous environments.
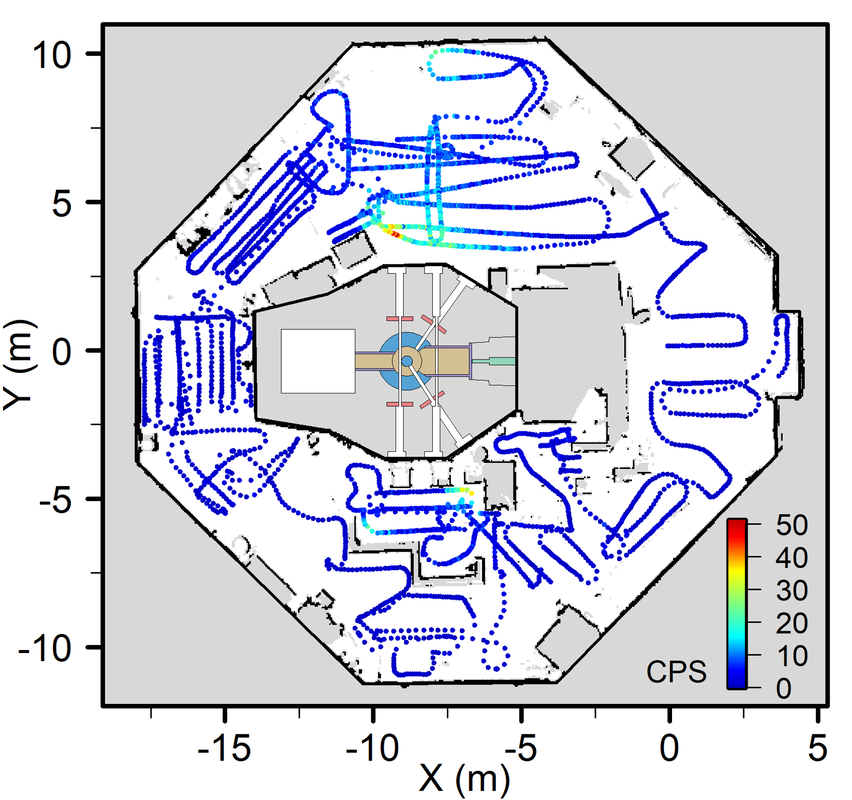
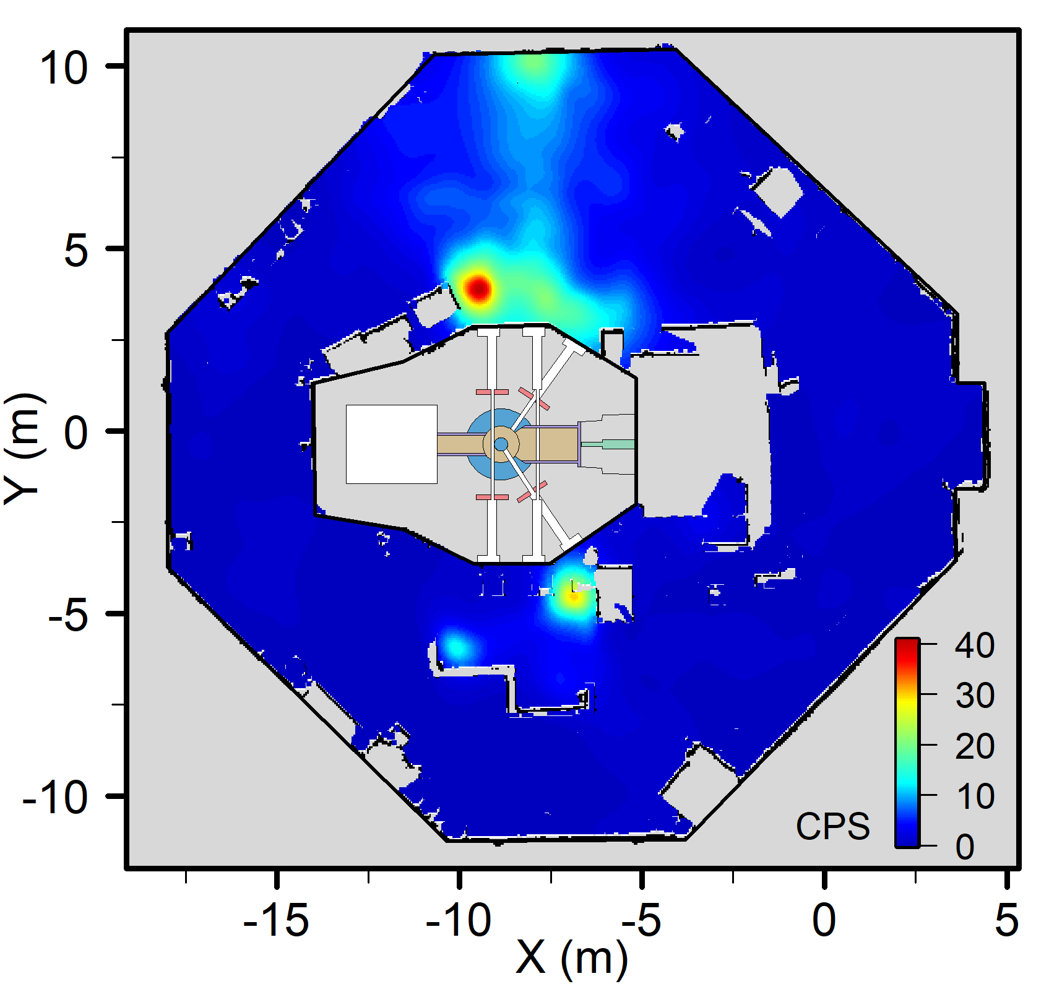
If you would like to learn more, then please get in touch. 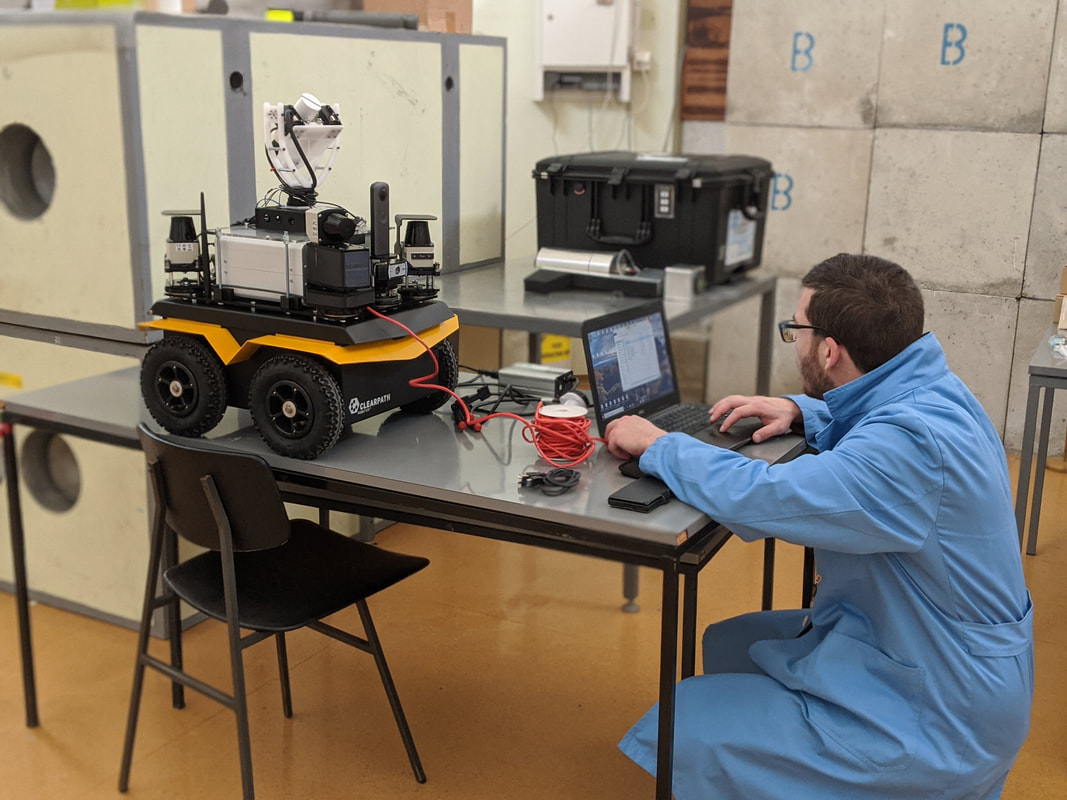 Following the deployment of the TORONE platform at the JSI TRIGA Mk II nuclear reactor, one of the tasks undertaken was dose mapping in the reactor hall whilst operating. The robot was equipped with gamma radiation detection, and whilst being driven around was capable of recording count rate (counts per second - cps). These individual points can then be interpolated into a map of the entire environment. As highlighted in the paper published in Nature Scientific Reports, from hotspots identified in the map it was possible to infer radiation sources from other robot sensors such as camera images. The map is generated by the robot as part of its navigation and localisation, and is a convenient way to represent spatially resolved data. 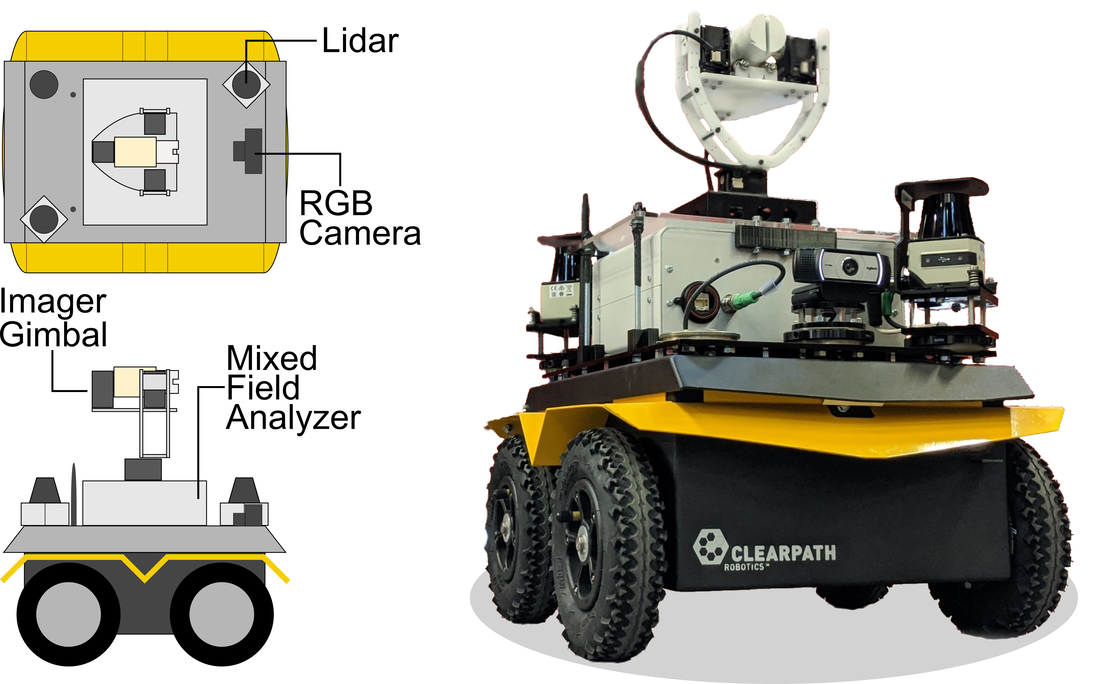 The first journal article has been published based on the TORONE deployment at the Jožef Stefan Institute TRIGA Mk II nuclear reactor. The article published in MDPI robotics, highlights the use of the TORONE platform for gamma imaging to aid in identifying radiation sources in an environment, but also identify isotopes using gamma spectroscopy.
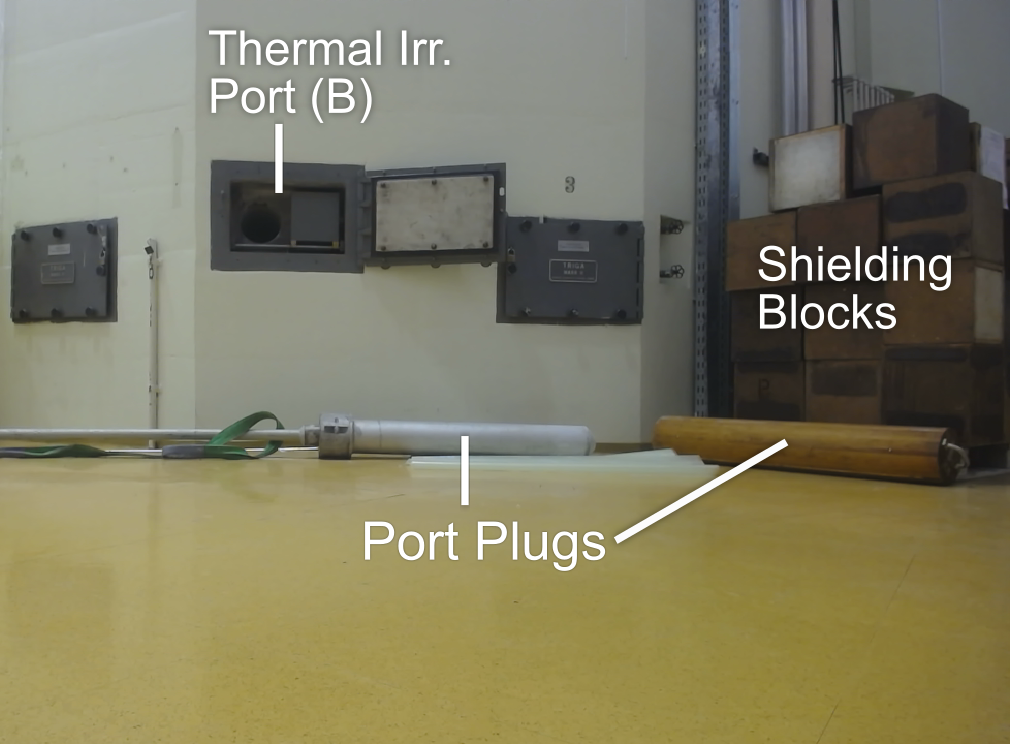
The specialised gimballed gamma detector is ROS (Robot Operating System) compatible, enabling the system to be used on a variety of robot platforms, and was used successfully in this study to characterise radiation output from a beam port of the nuclear reactor whilst under operation. This represents a scenario where human survey may be undesirable due to radiation exposure, but a robot can be utilised instead to remove humans from these hazardous scenarios. 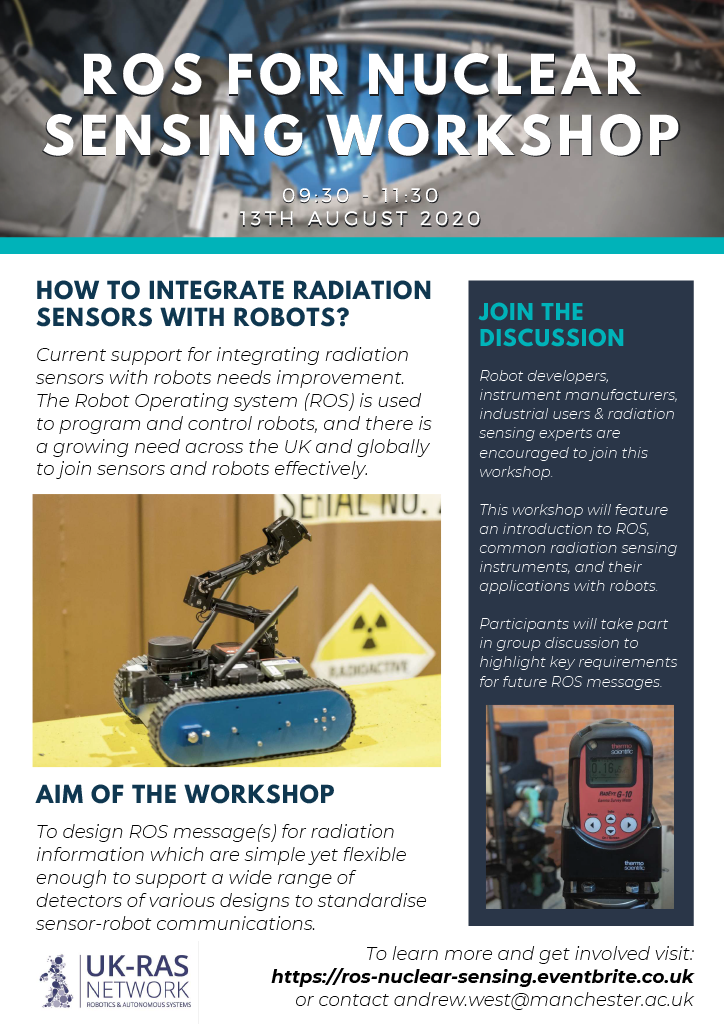 On the 13th August 2020, TORONE Researchers Dr. Andrew West and Dr Ioannis Tsitsimpelis are hosting a Workshop titled "ROS For Nuclear Sensing. Focussing on designing Robot Operating System (ROS) messages to better integrate radiation sensors onto robot platforms.  |



 RSS Feed
RSS Feed
