 In January 2020, the TORONE robot saw its first active deployment at the TRIGA Mark II research nuclear reactor operated by the Jožef Stefan Institute, Ljubljana, Slovenia. Part of the characterisation capabilities of TORONE is to produce 2D maps of radiation intensity, for unknown environments in the nuclear sector being able to highlight possible radiation sources is important.  Left to right: Andy West, Ioannis Tsitsimpelis, Chris Tighe (Lancaster University), Anže Jazbec (JSI). In real-world scenarios, the distribution of radioactive materials could be anything, but in the lab we are typically limited to point sources of radiation. The TRIGA reactor can produce non-point source radiation fields in a controlled manner, replicating more realistic scenarios which could be found during nuclear decommissioning challenges. Radiation sensors were integrated with the Clearpath Jackal robot, then manually driven around the reactor hall, recording the number of radiation events per second and the position of the robot from on-board LiDARs and SLAM (Simultaneous Localisation and Mapping). The reactor was operated at low power (1kW, just 0.4% full power), and a beam port of the reactor core opened to create a low level radiation field around one portion of the reactor hall. The robot was capable of correctly detecting this radiation, as well as successfully identifying radioactive sources in storage containers around the reactor hall in general. For example, the port plugs placed on the floor next to the open beam port, which are slightly radioactive due to the bombardment by neutrons when in their usual position installed in the port, were recognised as sources of radiation.
These maps will be useful for decision makers when tackling issues such as how to decommission nuclear facilities safely and effectively, and are just one of the many characterisation problems TORONE is striving to overcome. 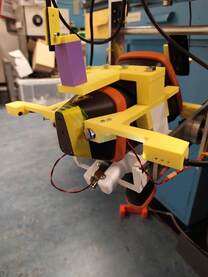 A Handheld Libs sensor within a mount A Handheld Libs sensor within a mount One of the major functions of the TORONE project is to provide remote characterisation in order to identify materials in areas that it isn’t safe to enter in order to assist in the decommissioning process. It was identified that two of the best ways to characterise materials were through LIBS and RAMAN Spectroscopy, with RAMAN focussing on the Molecular make-up of materials, and LIBS providing an elemental breakdown. (For information on how these work check out our Technologies and Approaches page). We spoke to Dr Paul Coffey to run us through some of the decisions and work that has gone in to selecting and creating our characterisation sensors. The biggest issue faced by the TORONE team in developing the LIBs and RAMAN sensors that will be used on the robot was limiting the size in order to easily fit on a robotic platform. These sensors are usually quite large, and based in a laboratory setting, so can have a considerable weight, whereas a portable sensor needs to be lightweight. This has led to creation of smaller systems that can be easily mounted onto the robotic platform, as well as transported to where they are required.  The Raman Probe attached to a robotic arm The Raman Probe attached to a robotic arm A further issue with being a portable system for both LIBS and RAMAN is the access to a power supply, with a robot having a limited battery supply, where a standard lab based system will have access to mains power. This has mean that the TORONE team have had to make sure that the highest quality laser is being used in order to make stand-off measurements, while also not being too power intensive.
In spite of this, the team have managed to create smaller systems that can be mounted to the robot platform, and are therefore portable, while also providing highly accurate readings. This will allow the autonomous robot to be sent off to measure the composition of a wide variety of materials, in a variety of areas across a nuclear site with minimal supervision due to the limited risk of loss of battery power, due to lower weights and a lower power consumption. If you would like to know more about the TORONE project, have a look around our website, or ask us a question below, or on our Twitter.  Throughout the TORONE project, that main aim has been to create a robot on which sensors are attached to perform in-situ analysis and mapping of radioactive sites throughout the world. Because of this, one of the main focuses of the project has been the choice of robot used to house these sensors. From the conception of the project, the focus has been using a stable platform that can meet a multitude of criteria: Able to hold multiple sensors, easily controllable, have in built capabilities to record its travel and location, and dust resistant due to the nature of the environments in which it will be operating. The first steps in this process included trying to create a ‘proof of concept’, so a platform in which the sensors could be mounted and test the location mapping, as well as starting to develop automated processes. This involved the use of the ‘Turtlebot2’ from Yujin Robot, which has been used over recent months to demonstrate the capabilities of the project, such as helping to demonstrate 3D Lidar mapping, as well as radiation detection during tests. The Turtlebot (pictured left) is loosely based on a ‘Roomba’ type robotic vacuum cleaning robot, with a small circular segment at the base which houses the motors, batteries and electronics. The shelves above the base allow for sensors to be mounted to the robot. Though a very capable and simple robot, it is not able to handle the heavy weight of some of the desired instruments being designed for TORONE, moreover, it has very little ground clearance. Being close to the ground is great for a vacuum cleaner, but risks getting stuck on obstacles in cluttered nuclear environments.  In order to fit in more with the project brief, a more rugged, smarter, and dust resistant robot has been acquired. The Clearpath Jackal (pictured below) will provide a more robust and larger platform on which the sensors can sit, boasting a payload weight of 20 kg, and greater ground clearance. As both the Turtlebot and the Jackal use the Robot Operating System (ROS), getting the new robot working has been more streamlined, allowing for the algorithms used for navigation and obstacle avoidance to be copied directly over. With the TORONE project hoping to reach nuclear environments worldwide, a specialised carry case has been commissioned in order to allow the robot to be transported on commercial air travel. Along with this, modular batteries which are safe for air travel have had to be created in order for them to be transported, while still providing the same required output.
Furthermore, as the TORONE project wishes to use a range of different sensing capabilities, it is required to easily swap and change sensors in the field. A special mount was required, as well as easy to use methods of attaching sensors had to be looked in to in order to provide the easiest user experience while setting up the platform, but not compromise on mechanical strength. It was settled that the most secure and easy option was to Schunk FWS manual tool change adaptors designed for changing tools on robot arms. They are secured using a twist motion, locking in place quickly, but also easy to remove, speeding up the disassembly process, while also making it easy to change sensors when required. As the project approaches deployment into radioactive environments the Clearpath Jackal will offer a more rugged platform on which bespoke instruments can be utilised, but a heartfelt thanks goes out to the adorable Turtlebot2 and all the progress it has allowed the project. Dr Andrew West We asked Dr Andrew West, PDRA on the TORONE project, to explain to us how our robot sees the world around it in order to successfully manoeuvre around. Here's what he had to say:
It is expected that robots are capable of avoiding obstacles, from vacuum cleaner robots avoiding table legs, to driverless cars avoiding pedestrians. The TORONE project has the same need to ensure the robot will not bump into anything as it remotely inspects nuclear environments. There are many sensors which enable robots to make sense of the world around them, but the TORONE project mainly relies on one particular type, lidar. Lidar uses the same concepts as radar or sonar to measure distances to objects, but instead of using radio (radar) or sound (sonar) it uses laser light. Pulses of light are sent out, bounce off an object, and a portion of that pulse returns back to a sensor. By measuring the time taken for the light to travel to the object and back, it is possible to estimate the distance to that object (as the speed of light is constant). By sending laser pulses in many directions, a lidar sensor can generate an impression of the objects around it based on these distances. As laser light can travel long distances, the robot can "see" into the distance and if an obstacle is approaching change course well in advance. A major benefit of lidar is the capability to be used over long ranges, but also that it works in the dark. Many nuclear environments may be poorly lit or not lit at all, rendering cameras tricky to use without banks of lights on the robot. A downside of lidar is their cost, as a typical sensor may cost anywhere from £1,000 to £10,000+, especially when compared to a simple webcam around <£100, the use of lidar can be seen as costly. For the challenges facing the TORONE project however, lidar sensors offer a superior solution to allowing the robot to be able to know about the world around it. If you are interested in the other technology we employ on the TORONE project, have a look at our Technologies page to look at the variety of sensors thawt will be deployed on our robot. If you would like to find out more about Dr Andrew West, or any of our other researchers, you can check out our Team page |
 RSS Feed
RSS Feed
